Kalman Filter
Reference: 선형 칼만 필터의 원리 이해
🍇 Why do we need a Kalman Filter?
- To estimate the position of a robot precisely.
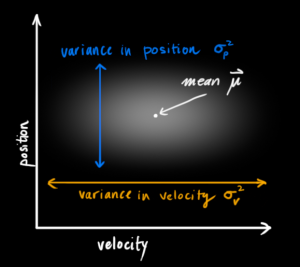
- The state of a robot is portrayed as
(position, velocity) - Position and velocity both have some sort of uncertainty, which can be interpreted to some form of a Gaussian distribution.
🍇 Correlation between position and velocity
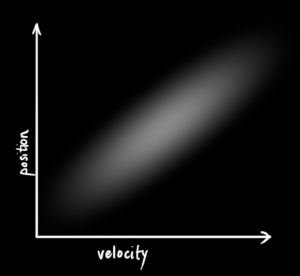
- In real life, position and velocity has some sort of correlation.
ex) lower velocity leads to shorter distances, and higher velocity leads to further distances - The goal for Kalman filter
→ Finding the correlation between position and velocity
→ This correlation is called a ‘covariance matrix’
 |  |
|---|---|
| Uncorrelated | Correlated |
🍇 How Kalman Filter Works - the math
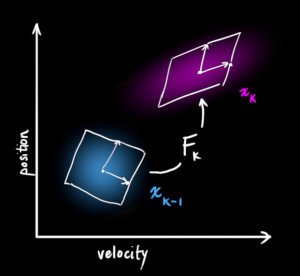
🏳️ Finding the prediction matrix , \(F_k\)
-
Let \(\hat x\) be the state function.
\[\hat x_k = \begin{bmatrix} p_k\\ v_k \end{bmatrix}\] -
Transformation Matrix : the matrix that uses the past state \((p_{k-1}, v_{k-1})\) to estimate the current state \((p_{k}, v_{k})\)
\[\hat x_k = F_k \hat x_{k-1}\] -
If all is true, the following can be said.
🏳️ Covariance Scaling
-
Covariance Scaling (proof)
\[Cov(Ax)=ACov(x)A^T\]
🏳️ Finding \(p-v\) Covariance
-
Covariance between position and velocitiy is like the below:
\[P_k = \begin{bmatrix} pp & pv\\ vp & vv \end{bmatrix}\] -
Now, with the prediction matrix and covariance scaling we can derive the formula.
\[\hat x_k = F_k \hat x_{k-1}\] \[Cov(Ax)=ACov(x)A^T\] \[P_k = F_k P_{k-1}F_k^T\] -
proof

🍇 External Factors